일본 과학기술진흥기관, NVIDIA-Powered Moonshot 로봇을 개발해 노인 돌봄에 적용
Source: NVIDIA AI Blog
Overview
Using NVIDIA Isaac Sim and RTX GPUs, humanoid‑robot research will automate cooking, cleaning, repositioning, and other caregiving tasks.
January 8 2026 · by Zoe Kessler

The next universal technology since the smartphone is on the horizon — and it may be a little less pocket‑friendly.
The Moonshot research program, funded by the Japan Science and Technology Agency (JST) and accelerated by NVIDIA AI and robotics technologies, is working to create a world by 2050 where AI‑powered, autonomously learning robots are integrated into Japanese citizens’ everyday lives.
That’s just goal No. 3 of the broader Moonshot initiative, which includes researchers from across Japan’s universities and comprises ten ambitious technology goals — from ultra‑early disease prediction to sustainable resource circulation.
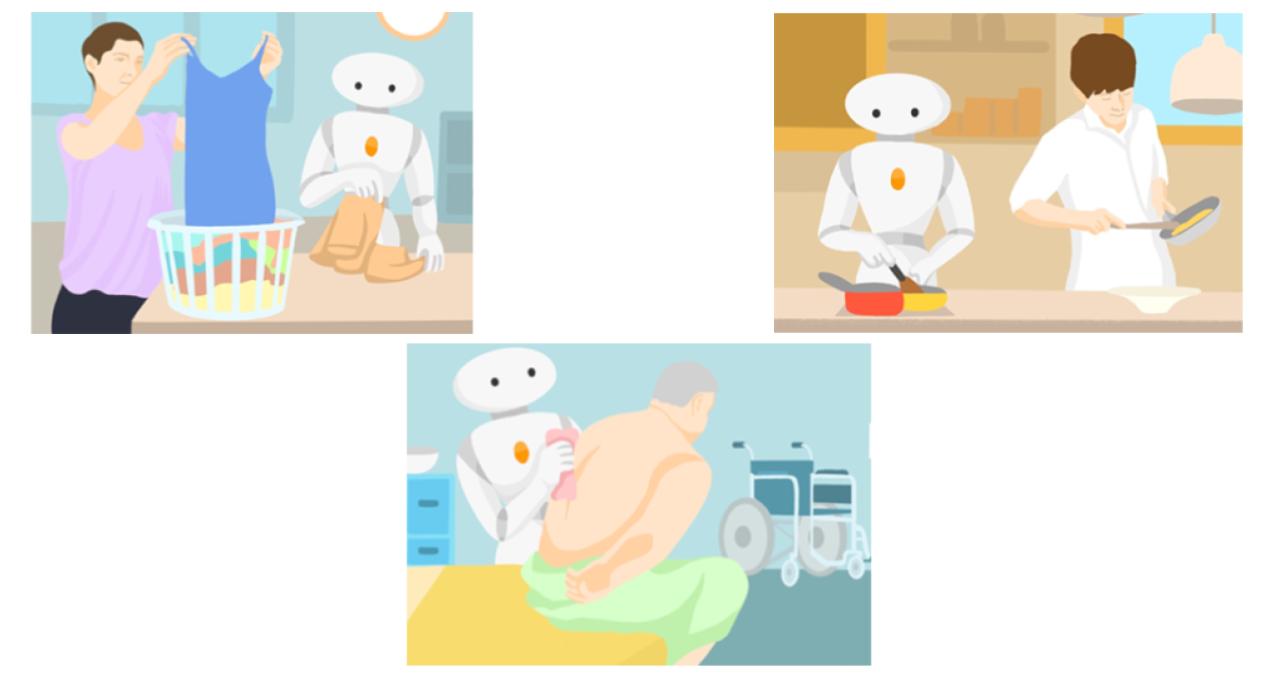
In light of Japan’s rising elderly population, many of the research projects underway focus on how robots can aid senior care. This includes designing a robot capable of caregiving tasks such as cooking, cleaning, and hygiene assistance.
NVIDIA 아키텍처가 Moonshot 로봇에 힘을 실어줍니다
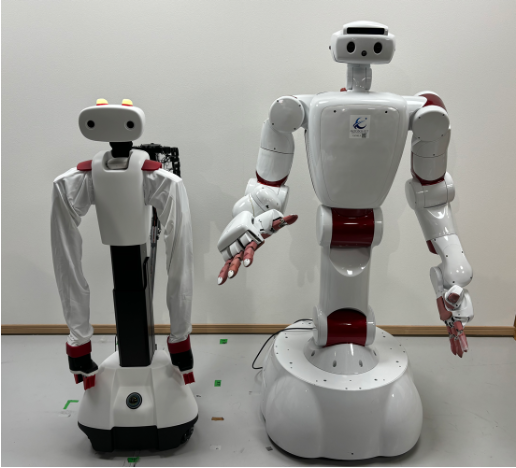
NVIDIA 기술은 AI‑Driven Robot for Embrace and Care (AIREC) 로 알려진 Moonshot 프로젝트의 시니어 케어 로봇 모든 단계에 통합되었습니다.
- Dry‑AIREC – Moonshot 가족 중 더 크고 이동성이 높은 구성원으로, 두 개의 NVIDIA GPU를 탑재하고 있습니다.
- AIREC‑Basic – 주로 모션‑기반 모델을 위한 데이터 수집에 사용되며, 세 개의 NVIDIA Jetson Orin NX 모듈로 엣지 AI 처리를 수행합니다.
시뮬레이션 및 훈련
- NVIDIA Isaac Sim – 오픈소스 로봇 시뮬레이션 프레임워크로, AIREC 로봇이 물체 간 힘을 추정하는 등 특정 작업을 수행하도록 훈련하는 데 사용되었습니다.
NVIDIA 하드웨어와 AI 도구의 통합으로 이 프로젝트는 먼 꿈에서 실현 가능한 현실로 가속화되었습니다.
“5년 전, 생성 AI가 등장하기 전에는 이와 같은 응용이 가능하다고 믿는 사람이 거의 없었습니다,” 라고 와세다 대학 AI 및 로보틱스 연구소 교수이자 소장인 Tetsuya Ogata가 말했습니다. “이제는 이 기술을 둘러싞 분위기가 바뀌었기에, 우리는 이런 응용을 진지하게 고민할 수 있게 되었습니다.”
Source: …
전체적인 돌봄 역량 구축
노력 로봇의 노인 돌봄 역량을 개발하기 위한 추가 연구 프로젝트가 진행 중입니다.
“우리는 기저귀 교체, 환자 목욕 돕기, 식사 보조와 같은 일에 집중하고 있습니다. 이러한 행동을 로봇이 지원하도록 함으로써 돌보미는 환자들의 삶을 개선하는 데 집중할 수 있습니다.” — 마쓰무라 미사, 바이오엔지니어링 석사과정 학생, 도쿄대.
최근 마쓰무라가 IEEE/RSJ 국제 지능형 로봇 및 시스템 학회(IEEE/RSJ International Conference on Intelligent Robots and Systems) 에 발표한 논문은 재배치에 초점을 맞추었습니다. 재배치는 노인 돌봄에서 욕창을 예방하고 기저귀 교체를 가능하게 하는 필수적인 행동입니다.
핵심 기술 포인트
- 휴머노이드 로봇(Dry‑AIREC)은 각 환자의 개인 상태와 신체적 요구를 고려해야 합니다.
- 학습은 NVIDIA RTX GPU가 장착된 노트북에서 수행되었습니다.
- 파이프라인은 3D 자세 추정, 궤적 계산, 그리고 힘 추정을 결합했습니다.
- Dry‑AIREC의 어안 및 깊이 카메라는 환자를 재배치하는 데 필요한 움직임을 포착합니다.
- 숙련된 돌보미 데이터에서 도출된 궤적 계산은 각 환자에 맞는 정확한 재배치 방법을 결정합니다.
- 힘 예측(어깨와 무릎 압력)은 로봇이 적절한 시점에 적절한 힘을 가하도록 하여 불편함을 방지합니다.
예비 실험은 마네킹을 사용했으며, 현재 연구는 인간 대상 실험으로 진행되어 시스템을 더욱 정교화하고 있습니다.
일본 과학기술진흥기관(JST) 목표 3에 대한 이정표 이미지.
개인적 동기
“제 연구 분야는 의료 로봇이지만, 어머니가 나이가 들어가면서 개인적인 돌봄의 중요성을 체감하게 되어 이 프로젝트에 참여하게 되었습니다.”라고 고바야시 에츠코 교수(도쿄대 바이오엔지니어링)와 마쓰무라의 지도교수가 말했습니다. “의료 로봇 분야에서의 경험을 돌봄 로봇에 의미 있게 확장함으로써 인간 중심 응용을 위한 안전하고 신뢰할 수 있는 로봇 시스템 개발에 기여할 수 있었습니다.”
목표 3을 위한 Moonshot 팀은 2026 국제 시스템 통합 심포지엄 (SII 2026) 에서 그 진행 상황을 선보일 예정입니다.
- NVIDIA Isaac Sim 에 대해 자세히 알아보세요.*