챗봇을 넘어: 신뢰할 수 있는 AI를 위한 청사진
Source: Google Developers Blog
날짜: 2026년 1월 29일
작성자: Ajeet Mirwani – 미국 프로그램 리드, Google Developer Experts
시속 100 마일에서는 AI “환각”이 있을 여유가 없습니다.
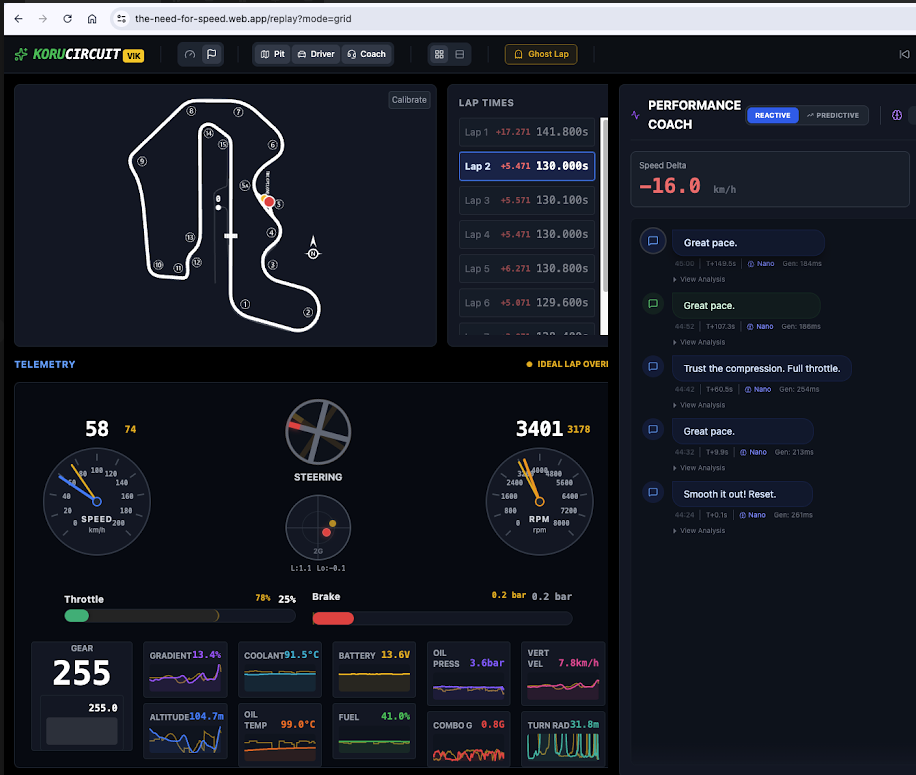
캘리포니아 윌로스에 있는 Thunderhill Raceway에서 레이스카가 고속 코너에 접근할 때, 완벽한 라인과 위험한 미끄러짐 사이의 차이는 밀리초 단위로 측정됩니다. 전통적으로 성능 텔레메트리는 사후에 무슨 일이 일어났는지 알려주는 정적 코드를 사용했습니다. 소수의 Google Developer Experts(GDE) 팀은 AI가 실시간으로 운전자의 귀에 들어가 원시 데이터를 신뢰할 수 있는 순간 순간의 안내로 변환할 수 있는지 확인하고 싶었습니다.

통합 여정을 통한 에이전트 주도 개발
이 테스트에서 가장 눈에 띄는 부분은 결과 자체가 아니라 개발 속도였습니다. Antigravity (AGY)—상태를 유지하는 에이전트 시스템을 조율하기 위한 Google의 새로운 프레임워크—를 활용해 팀은 자연어 기반 오케스트레이션으로 3개월짜리 개발 주기를 단 2주로 압축했습니다. AGY 에이전트 매니저는 대규모 콜드‑패스 데이터 처리와 기본 물리 로직을 담당해 워크플로를 가속화했으며, GDE는 “vibe coding”을 통해 고수준 시스템 동작에 집중할 수 있었습니다.
이 프로젝트는 Google의 Unified Developer Journey에 대한 스트레스 테스트 역할을 했습니다. GDE는 Google AI Studio에서 빠른 프로토타이핑으로 시작한 뒤, 그 설계도를 활용해 Vertex AI—프로덕션 급 시스템을 위한 “프로‑티어” 경로—로 전환했습니다. 수천 줄의 기본 물리 코드를 작성하는 대신, 자연어로 원하는 에이전트 행동을 기술했고, 이를 통해 Firebase를 이용한 고규모 처리와 실시간 상태 관리용 아키텍처를 구축했습니다.
“스플릿‑브레인” 아키텍처
프레임워크의 기반은 반사와 전략을 분리하는 “스플릿‑브레인” 아키텍처입니다. 이 복잡한 배치를 관리하기 위해 GDE들은 전문화된 스트라이크 팀으로 운영되었습니다:
인텔리전스 팀
- Jigyasa Grover
- Vikram Tiwari
- 다계층 시스템을 구현했습니다: Gemini Nano는 엣지에서 초당 반사 행동을 수행하고, 상위 수준의 추론 및 전략적 랩 분석은 Gemini 3.0이 담당합니다.
- Margaret Maynard‑Reid 가 일일 스탠드‑업을 이끌었습니다.

엣지 팀
- Sebastian Gomez 가 Web API를 통해 Chrome에서 Nano를 사용해 약 15 ms 응답 시간을 달성하도록 주도했습니다.
- Austin Bennett 가 “Data Crucible” 노드를 고속으로 유지하기 위해 필요한 복잡한 하드웨어 구성을 관리했습니다.
퍼셉션 팀
- Hemanth HM
- Vikram Tiwari (다시) 가 애플리케이션 레이어에서 트랙을 구현하는 데 도움을 주었습니다.
- Maps MCP 를 활용해 시스템이 트랙 레이아웃을 “볼” 수 있게 하고, 실시간 3D 텔레메트리를 60 FPS로 렌더링하여 운전자의 라인과 AI의 물리 기반 권고 사이의 “고스트 분석”을 가능하게 했습니다.
이 에이전시 라우팅은 Antigravity 를 통해 완전히 관리되었으며, 이는 Gemini Nano의 엣지 반사(~15 ms)와 Gemini 3.0의 전략적 추론 사이의 오케스트레이션 레이어 역할을 했습니다. 이러한 모델 간 자동 핸드오프를 통해 프레임워크는 시속 100 mph를 초과하는 속도에서도 실시간 상태 관리를 유지했습니다.
수학적으로 검증 가능한 코칭
신뢰는 검증에 기반합니다. **Rabimba Karanjai**는 AI의 조언이 물리학에 근거하도록 Neuro‑Symbolic Training 방식을 구현했습니다. QLoRA를 사용해 “Golden Lap” 기준선에 모델을 미세 조정함으로써 시스템은 스스로 코칭을 수학적으로 검증할 수 있었습니다. AI가 운전자에게 “브레이크를 늦게 밟으라”고 말한다면, 이는 프레임워크가 물리 법칙에 비추어 그 조언을 검증했기 때문입니다.
팀은 실시간 트리아지를 위해 Draft → Verify → Refine 에이전시 루프를 사용했습니다. 피트 레인에서 데이터 마찰이 발생했을 때, AGY Agent Manager는:
- 코드 수정을 제안했습니다.
- 텔레메트리 기준선에 대해 자동 브라우저 검증을 수행했습니다.
- 검증된 업데이트를 랩 사이의 차량 “Data Crucible”에 푸시했습니다.
이 자체 교정 워크플로우는 “브레이크를 20 피트 늦게 밟는다”와 같은 코칭 조언이 항상 물리학에 기반하고 안전을 위해 사전 검증되도록 보장했습니다.
“Gemini Squad”: 교육학에 기반
데이터와 인간 이해 사이의 격차를 메우기 위해 Lynn Langit 은 Human Pedagogy에 기반한 페르소나‑기반 라우팅을 도입했습니다. 이 프레임워크는 AJ the Crew Chief와 Ross the Telemetry Engineer와 같은 에이전트들로 구성된 “Gemini Squad”를 사용해 상황‑인식 안내를 제공합니다. 교육학적 페르소나를 주입함으로써 시스템은 운전자의 전문성 수준에 맞춰 설명을 맞춤화하여 AI의 권고가 실행 가능하고 이해하기 쉬워집니다.
이 게시물은 Ajeet Mirwani, Americas Program Lead, Google Developer Experts가 작성했으며, 위에 설명된 GDE 팀의 협업 노력의 결과입니다.
Ground Truths: The Next Field Test
Thunderhill 현장 테스트는 “AI Trust Gap” 를 스플릿‑브레인 아키텍처와 Google의 Unified Developer Journey를 사용해 해소할 수 있음을 입증했습니다. 시스템 출력물을 검토한 후, Thunderhill CEO인 Matt Busby는 다음과 같이 언급했습니다:
“여러분은 하루 만에 전체 산업이 40년 동안 이룬 것보다 더 많은 일을 해냈습니다. 이 시스템은 직감과 객관적 논리를 결합해 레이싱 데이터를 반복 가능하고 정확하게 만들며, 현재 시장에 존재하는 것보다 수광년 앞선 수준입니다.”
Ready to build?
이 GDE 그룹이 보여준 바와 같이, 실험 프로토타입에서 프로덕션 시스템으로의 도약은 복잡하지만 충분히 헤쳐 나갈 수 있습니다. 감각적인 코딩을 넘어 Vertex AI ‘프로‑티어’ 에서 구축을 시작하고 싶다면, 우리의 ADK Crash Course 를 시작해 보세요. 이를 통해 복잡한 작업을 수행할 수 있는 추론·계획·도구 활용이 가능한 정교하고 자율적인 시스템을 만들 수 있습니다.
Deep Dives from our GDEs
- Trust at Top Speed by Jigyasa Grover – 스플릿‑브레인 아키텍처 조정.
- A Split‑Brain Neuro‑Symbolic Training Method by Rabimba Karanjai – 안전성과 검증 가능성을 위한 파인‑튜닝.
- Racing at the Edge by Lynn Langit – 인지 부하 관리와 페르소나 라우팅.
- Taking AI Agents to the Track by Hemanth HM – 브라우저 기반 모델 및 Maps 통합.
- The Race for Real‑Time by Vikram Tiwari – 60 FPS 렌더링 및 4‑계층 계층 구조.

Photo captured by @gotbluemilk
Previous | Next