Harvard researchers develop novel 3D printing method for soft robotics — rotational multi-material method creates muscle-like structures that can be programmed to twist, lift, or bend
Source: Tom’s Hardware
Image credit: Getty Images
New Rotational Multi‑Material 3D Printing Technique
Harvard engineers have developed a novel 3D printing method that enables fully flexible structures capable of twisting, lifting, or bending on demand. The technique—called rotational multi‑material 3D printing—was created by former postgraduate student Natalie Larson and graduate student Jackson Wilt at the John A. Paulson School of Engineering and Applied Sciences.
The method merges several existing approaches and uses a single, continuously rotating nozzle to print multiple materials simultaneously. By adjusting the nozzle design, rotation speed, and flow rate, the team can precisely control how the materials combine during printing.
How It Works
- Outer layer: A durable polyurethane forms a strong exterior shell.
- Inner layer: A poloxamer (a hair‑gel‑like polymer) is printed inside the shell. After printing, the gel is washed out, leaving hollow tubes.
- Actuation: The hollow tubes can be pressurized with air or fluid, causing them to act as artificial muscles that bend, twist, or extend.
The design can embed motion logic directly into the structure. By rotating the two printed materials in specific ways, the robot’s deformation direction is programmed during inflation.
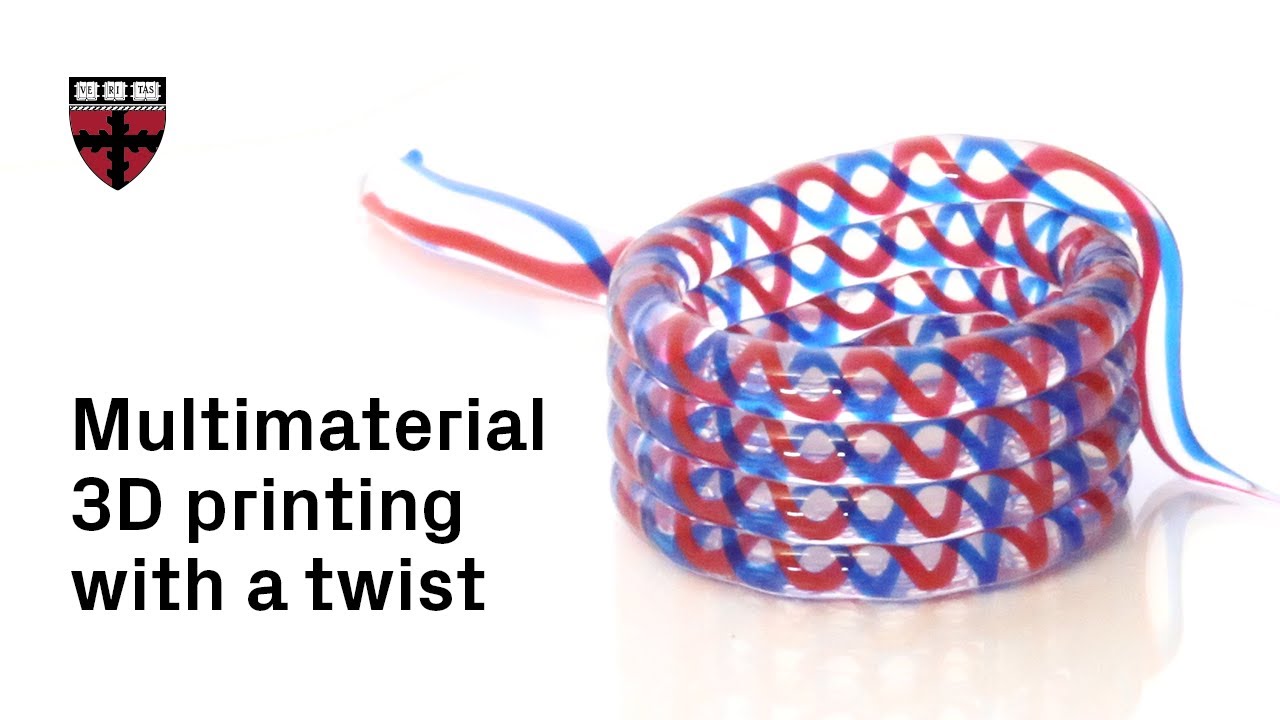
Demonstrations
- Flower‑like spiral actuator: Inflates and unfurls like a blooming flower.
- Hand‑like gripper: Features fingers that curl around objects when pressurized.
These examples showcase the ability to create complex, pre‑programmed motions in a single print.
Advantages Over Traditional Soft‑Robot Fabrication
- Speed: Eliminates the time‑consuming casting and molding steps required for conventional soft robots.
- Simplicity: Reduces the number of components and assembly steps by producing a complete, functional structure in one printing pass.
Publication and Patent
The research has been published in Advanced Materials (doi:10.1002/adma.202510141) and a patent filing is underway.
Video Overview
Watch on YouTube