2025-12-21 每日机器人新闻
Source: Dev.to
Robotics Week in Review
人形风采、前沿操作以及大胆的市场举措定义了过去的一周。下面我们将解析技术基础、市场波动以及通向可扩展机器人技术的路径。
1. Unitree 的 G1 人形机器人抢尽风头
Unitree 的紧凑型 G1 人形机器人在华裔美国歌手 王力宏 的 “Best Place Tour” 演唱会现场,与他一起完成了同步舞蹈和特技表演,地点位于成都东安湖体育公园多功能体育馆,吸引了 18 000 名观众。
表演亮点
- 后空翻 与流畅的编舞,配合 “Open Fire” 的开场节拍。
- 与人类舞者的无缝互动,在 X 上获得 Elon Musk 的 “Bigtime” 评价。
技术规格
| 参数 | 数值 |
|---|---|
| 身高 | ≈ 1 320 mm |
| 重量 | ≈ 35 kg |
| 折叠尺寸(运输时) | ≈ 690 mm |
“中国的机器人现在什么都能做,甚至像专业人士一样在舞台上跳舞。这里的 Unitree 机器人做后空翻,还在华裔美国歌手王力宏的成都演唱会上表演。” – Rohan Paul
为什么身高重要
- 重心更低 → 平衡性提升。
- 链节更短 → 惯性减小,能够实现更高的加速度。
- 更小的驱动器即可完成动态动作,提高了与人共存的安全性。
商业意义
- **定价:**约 US $16 000 每台(研究平台)。
- 成本优势来源于紧凑设计和大批量生产的零部件。
- **市场前景:**Tuo Liu 预测,人形机器人与歌手同台表演将很快成为常态。
“这次亮相标志着更广泛的文化融合以及基于活动的部署潜力。” – Futurism
批判性观点
Chris Paxton 警告称,舞蹈 只是相较于 洗碗 等实际家务的 表演,真正的实用价值在后者。G1 公开的结构显示出硬件的成熟度,但争论仍在继续:可见性是加速融资的助推器,还是招致更多审视的因素?
2. Kyber Labs的超人般灵巧
Kyber Labs展示了极其精确的操作演示,Chris Paxton称其为“少数达到超人水平的案例之一”。
演示壮举
- 穿针引线。
- 组装具有亚毫米公差的复杂部件。
关键技术
- 高级末端执行器。
- 实时感知流水线。
- 基础模型(例如Trace Anything),可预测操作的点轨迹和视频预测,降低机器人学习中的标注负担。
“这是唯一几家真正似乎实现了超人灵巧的公司之一。” – Chris Paxton
更广泛的影响
- 自动化微型工厂 – 价值5 000美元的盒子大小单元,可更换工具全天候制造电子产品(由Ilir Aliu强调)。
- 工具发明框架 – VLMgineer 使视觉语言模型能够设计工具和使用动作,无需模板或示例,在12个RoboToolBench任务中比人工设计高出64.7 %。
这些进展指向通用硬件迭代,无需人为先验——想象一个能够自行进化工具的机器人工厂。
3. 行业部署与研究亮点
| 部署 / 论文 | 亮点 |
|---|---|
| UPS & Pickle Robot Company | UPS 承诺投入 数百万 用于部署卡车卸货机器人,加速物流自动化。 |
| Terrain‑Predicting Legged Systems | 近期论文展示了能够预测地形变化的腿式机器人,提升了运动的鲁棒性。 |
| MicroFactory Production Boxes | 紧凑且模块化的生产单元,使制造业大众化(参见 Ilir Aliu 的推文)。 |
| Skepticism from Rodney Brooks | 警告对类人机器人炒作的危害,呼吁关注功能实用性。 |
4. 硬件创新
- MicroFactory’s mini production boxes – 盒子大小的单元,能够交换工具并持续组装电子产品。
- VLMgineer – 视觉‑语言模型框架,能够自主设计工具,在 RoboToolBench 上实现最先进的性能。
5. 视觉

6. Outlook
- Humanoids 正在从 spectacle 向 commercial viability 转变,随着成本下降和设计更为紧凑。
- Dexterous manipulation 正实现超人水平的性能,开启全新的制造范式。
- Market traction(例如 UPS、Pickle Robot)显示出对机器人辅助物流和微型工厂概念的信心。
hardware maturity、foundational AI models和real‑world deployments的融合指向在未来几年内对可扩展、实用机器人技术的快速加速。
自定义抓手与零样本泛化
Robot Utility Models (RUMs) 来自 NYU 和 Hello Robot 展示了零样本泛化,在未见过的环境中实现抽屉开启和袋子拾取 90 % 成功率,且 无需重新训练。
- 在 iPhone 上收集数据
- 多模态 LLM 自检
“Paxton 对运动预测线如 NovaFlow 和 Amplify 的赞誉强调了视频衍生动作如何绕过昂贵的标注,提升灵巧性收益。”
这些进展标志着一个拐点:从脚本化演示转向自适应系统,能够在仓库或家庭中实现 大幅降低部署成本,采用“一次训练,随处部署”的范式。
Source: …
RSS 2025 决赛入围者:用于腿式机器人的前向动力学模型
在 RSS 2025 入围作品中,一项突出成果提出了 感知前向动力学模型,能够在崎岖地形上预测机器人状态最长 5 秒,且无需人工调参或刚性限制。
关键特性
- 基于多年仿真加真实数据进行训练。
- 融合感知与本体感受,实现零样本导航。
- 通过仿真到真实的迁移提升成功率与安全性。
“该模型的优势在于部署无烦恼:最小的成本调参即可实现稳健的运动控制。” – 项目网站与论文
含义
- 应用场景: 适用于四旋翼或双足机器人在搜救、检查以及其他现场任务中的使用。
- 类人机器人扩展: 可与 DEEP Robotics 的 DR02(“随心运动,平衡动力”)集成。
- 工业应用: 支持 Apptronik 的 Apollo 机器人,实现工厂自主巡航。
行业背景
- Tuo Liu 的自拍人形机器人 暗示了休闲部署的可能,但可靠的崎岖地形预测才是实现自主的真正关键。
- 该工作通过解决运动学的未解难题,抵消了以灵巧性为中心的炒作,可能在非结构化空间中 将导航失误率降低一半,并加速类人机器人在工厂的试验。
物流聚焦:UPS 与 Pickle 卡车卸载机器人
UPS 正在 earmarking $120 M 用于 ≈ 400 台 Pickle 卡车卸载机器人,目标通过削减码头人工和提升拖车吞吐量,实现 18 个月的回报。
关键细节
- 循环时间: 一台机器人使用吸力夹爪在 2 小时 内卸载一辆装有凌乱堆叠的 50 磅纸箱的卡车。
- 移动性: 移动底座驶入拖车,并利用感知‑规划循环实现无碰撞的抓取,放置到传送带上。
- 战略契合度: 这是 UPS $9 B 自动化冲刺 在 60 多个站点中的一环,目标是 到 2028 年实现 $3 B 的节省。
“UPS 正在 earmarking 大约 $120 M 购买约 400 台 Pickle 卡车卸载机器人,旨在削减码头人工并加快拖车周转。” – Rohan Paul
前景
- 规模化: Pickle 最近聘请的 CFO 表明将在 2026 年底前进行更广泛的部署。
- 行业影响: 这一单一任务的成功验证了移动机械臂在物流中的可行性,并与 Apptronik 的人机增强理念相呼应。
- 未来猜想: 当 Tuo Liu 对 5‑10 年内人形机器人取代咖啡店员工 进行投票时,Pickle 的成功预示了向人形机器人扩展的路径,而专用机器人则提供了通往通用机器人的更快桥梁。
可视化洞察
Paxton 批评了 ego 数据因过于简化的基准导致的快速收益平台期,强调手部姿态质量——这为类似 Pickle 的系统在真实车队上迭代提供了经验教训。
Source:
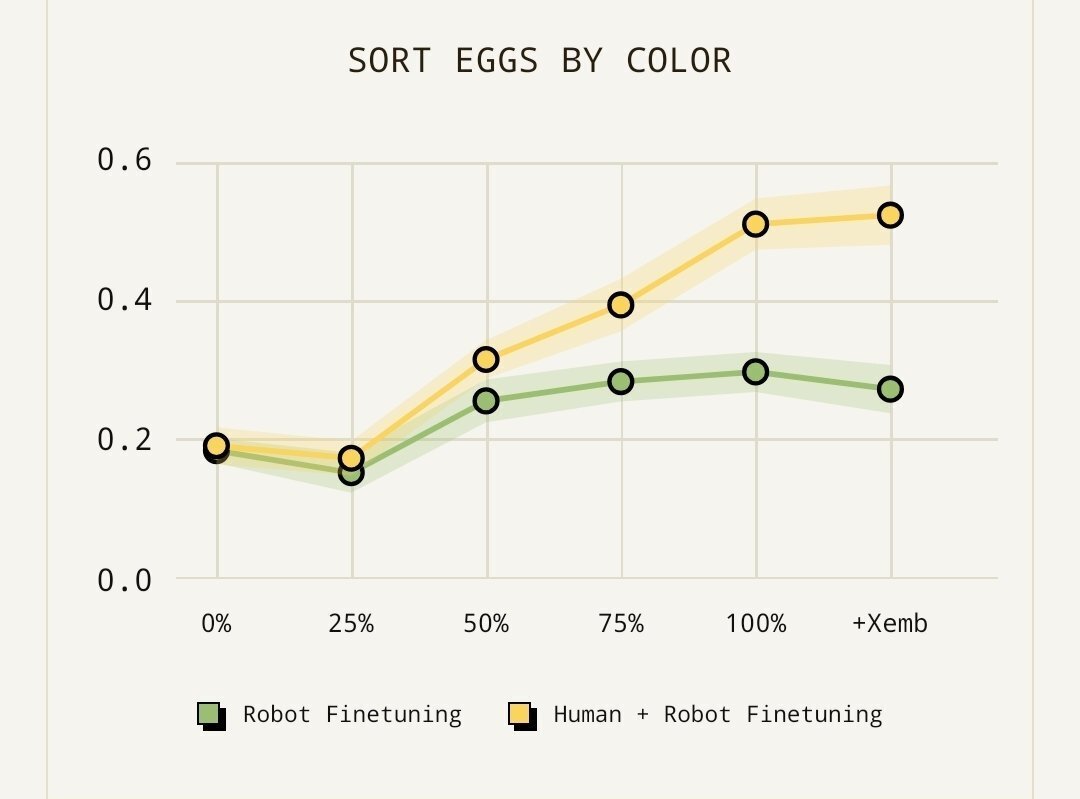
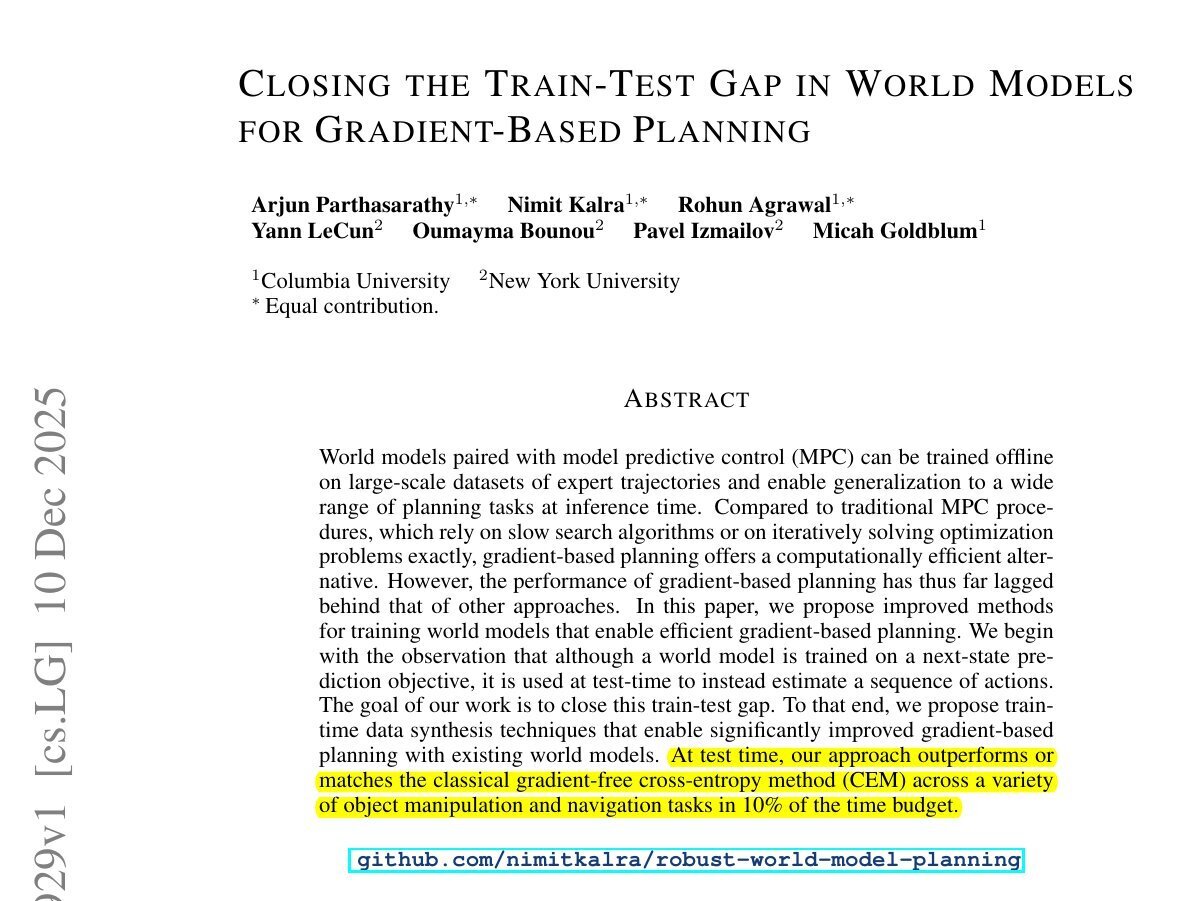
规划加速: 10× 更快的世界模型规划
一篇新论文 将机器人规划时间缩短 10 倍,同时保持与交叉熵方法 (CEM) 相同的质量。
- 在线世界建模 – 在真实模拟器回滚上重新训练模型。
- 对抗性世界建模 – 平滑梯度,缩小训练‑测试差距。
“一篇新论文将机器人规划时间大幅缩短约 10 倍,但仍能达到比慢速的交叉熵方法基线相同的规划质量。” – Rohan Paul
技术深度
- 专家示范用于训练 一步预测,但规划需要 多步前瞻。
- 对抗性微调缩小损失曲面,引导优化器朝向准确的“提示”,从而实现目标。
该 ArXiv 预印本 (2512.09929) 展示了在 10 % 计算量 下实现等效性能,这对采样成为瓶颈的实时类人机器人具有变革意义。
含义
- 更快的规划解锁了灵巧的操作链,能够与 Kyber 精度或 RUMs 通用性协同。
- 让我们更接近 无碰撞的家庭和工厂。
来自规划论文的插图
硬件趋势与生态系统
- Robotuo 的深圳总部 – Twitter 帖子 展示了推动中国 AI 硬件生态的开源中心。
- Jeffrey Weichsel 的愿景 – 他设想“像 Tesla Optimus 那样的类人机器人配备 Grok 大脑,将带来无限丰裕”,实现以材料成本生产手工品质商品,并通过普遍创业消除贫困。
“大多数人不了解我们的世界即将发生的深刻变化。像 @Tesla_Optimus 这样的类人机器人,拥有 @grok 作为大脑,能够制造主人所要求的任何东西……将不再有贫穷,只有财富。” – Jeffrey Weichsel
-
Elon Musk 再次强调,Grok 不需要高频交易来驱动对撞机——只需要 Optimus 和 Boring Company 就能支持大型项目。
-
Rodney Brooks(Roomba/Baxter 的创始人)警告不要被炒作冲昏头脑,这一观点得到了 Scott Angelist 和 Chris Paxton 的呼应,他们讨论了诸如 类人机器人准备度 等可解决的问题。
- 阅读 Paxton 的观点:类人机器人准备好迎接…?
Rodney Brooks 批评机器人炒作

深圳的 AI‑硬件中心
“深圳可能拥有最独特的 AI 硬件和机器人创业生态系统,吸引了国内外最聪明的创始人。” – Tuo Liu
- Tuo Liu 为这座城市的 AI‑硬件中心站台: Twitter 线程。
- Futurism 报道了这一文化转变,呈现了演唱会式的机器人秀: 机器人担任伴舞。
这些帖子编织出一幅图景:炫目的演示与务实的部署相交,研究夯实基础,辩论聚焦要点。类人机器人正从舞台走向货架,灵巧度正在重新定义可能性。
MicroFactory:“盒装小型工厂”
- 概念 – 一个价值5,000美元、24/7运行的单元,配备可更换工具,可自主制造电子产品。
- 推文 – Ilir Aliu的公告。
- 能力 – 通过模块化舱位处理PCB组装或3D打印,适用于供应链紧张时的快速原型制作。
“盒装小型工厂 – 24/7运行 – 成本5,000美元 – 工具可更换 – 自动制造电子产品。” – Ilir Aliu
重要性
- 成本从工业规模的数百万降至消费者规模的数千。
- 实现按需、弹性的供应链。
- 可与 RUMs 结合用于家庭制造,或扩展至 UPS 风格的物流,实现准时零部件供应。
深圳生态系统可视化

RUMs(鲁棒通用操控器)
- Performance – 90 % 零样本成功率,覆盖 25+ 环境。
- Open‑source project page – GitHub/RUMs